

强化学习——多臂老虎机问题
作者:oneraynyday
编译:Bot
编者按:无论有没有去过赌场,相信大多数人都不会对老虎机感到陌生。作为赌场里最常见的娱乐设备,老虎机不仅在现实中广受人们欢迎,它也频繁出现在电视电影乃至动画片中,连一些常见的APP里都有它的身影。

往机器里投入硬币后,玩家需要拉下拉把转动玻璃框中的图案,如果三个图案一致,玩家能获得所有累积奖金;如果不一致,投入的硬币就会被吞入累积奖金池。这个问题看似简单,但很多人也许都忽视了,其实它和围棋、游戏一样,也是个强化学习问题。
首先,我们要明确一点——老虎机问题是表格型解决方案工具的一种。之所以这么说,是因为我们可以把所有可能的状态放进一个表格中,然后让表格告诉我们需要了解的问题状态,继而为解决问题找出切实的解决方案。

假设我们有一台K臂老虎机,每根拉杆都能提供固定的一定数额的金钱,一次只能拉下一根拉杆,但我们不知道它们的具体回报是多少。在这个情景中,k根拉杆可以被视为k种不同的动作(action),拉下拉杆的总次数T是我们的总timestep。整个任务的目标是实现收益的最大化。

设在第  次拉下拉杆时,我们采取的动作是
次拉下拉杆时,我们采取的动作是  ,当时获得的回报是
,当时获得的回报是  。那么对于任意动作
。那么对于任意动作  ,它的动作值(value)
,它的动作值(value)  是:
是:
这个等式表示的是无论何时,如果我们选择动作 ,我们获得的实际回报就应该等于动作 的预期回报。
把上面这个句子再读三四遍,你觉得它行得通吗?如果我们事先已经知道拉下这个拉杆的最大收益是多少,那出于贪婪的目的,我们肯定每次都会选最好的动作,然后使最终回报最大化。但在强化学习问题中,贪婪算法并不一定等同于最优策略,这一步的贪婪可能会对下一步产生负面影响。
虽然很困难,但我们真的很想实现 ,所以对于timestep ,设  是 的近似值:
是 的近似值:
那么我们又该怎么获得 ?
注:上文中的回报(reward)和动作值(value)不是同一个概念。回报指的是执行动作后的当场回报,动作值是一个长期的回报。如果你吸毒了,一小时内你很high,回报很高,但长期来看,你获得的动作值就很可怕了。需要注意的是,因为老虎机只需要一个动作,所以这里的 不是未来回报之和,只是期望回报,它和其他地方的 也不一样(虽然有滥用符号之嫌,但还是请多包涵啦)。
函数
表示从状态
 表示从状态
表示从状态  出发,执行动作
出发,执行动作  带来的累计奖赏,称为“状态-动作值函数”(state-action value function)。——周志华《机器学习》
带来的累计奖赏,称为“状态-动作值函数”(state-action value function)。——周志华《机器学习》首先,我们需要估计动作值,再据此决定要采取的行动。
估算动作值
求解 近似值的一种简单方法是使用样本平均值:
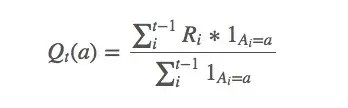
上述等式看起来好像有什么说法,但它其实很简单——选择动作 时,我们获得的平均回报是多少。这个均值可以被视为 的近似值,因为换几个符号,我们就能发现这就是强大数定律(SLLN)的表达式。
换句话说,它意味着 必须收敛于 :
比起概率收敛,这种收敛更强大,但它其实也没法保证 一定能收敛。bet356体育登录入口
动作选择规则:贪婪
“贪婪者总是一贫如洗。”当面对巨大诱惑时,一些人会因为贪婪越过自己的底线,去吸毒,去犯罪,但他们在获得短暂快感的同时也失去了更多东西。强化学习中同样存在类似的问题,如果它是贪婪的,它会找出迄今为止最大的动作值:
并依据这个动作值去选择每一步动作。这样做的后果是智能体从头到尾只会选择同一套动作,而从不去尝试其他动作,在很多情况下,这样的策略并不是最优策略。
动作选择规则:ϵ-Greedy
那么我们该怎么纠正它的贪婪?之前我们在《强化学习——蒙特卡洛方法介绍》一文中已经介绍过  :对于任何时刻 的执行exploration小概率
:对于任何时刻 的执行exploration小概率  ,我们会有
,我们会有  的概率会进行exploration,有
的概率会进行exploration,有  的概率进行exploitation。这可以简单理解成抛硬币,除了正面和反面,它还有一个极小的立起来的概率。
的概率进行exploitation。这可以简单理解成抛硬币,除了正面和反面,它还有一个极小的立起来的概率。
虽然当智能体“头脑发热”时,它还是会义无反顾地贪婪,但相比贪婪策略,  随机选择策略(不贪婪)的概率是
随机选择策略(不贪婪)的概率是  。
。
导致这种现象的主要原因是动作值会随时间推移发生变化,即之前我们研究的是静态的拉杆,而不是随机的、动态的拉杆。以动作值为例,比起我们之前假设的 ,它更应该被表示成  。
。
依据之前的动作值估计,我们有:
它也可以被写成:
看起来SGD可以在这里发挥一些作用。如果它是平稳的,那 收敛的概率就是100%;如果它不平稳,我们一般不希望  ,因为当前回报会影响当前的动作值。
,因为当前回报会影响当前的动作值。
这里我们把权重  替换成
替换成 ![α(α∈(0,1])](https://365bet-china.org/wp-content/uploads/2023/07/A0U4x.jpg) :
:
这是一个指数平均值,它在几何上衰减之前回报的权重。设函数  是第
是第  个timestep,也就是第 次拉下拉杆时某个特定回报的权重。因为老虎机问题只需考虑动作 ,所以这个函数也可以简化成
个timestep,也就是第 次拉下拉杆时某个特定回报的权重。因为老虎机问题只需考虑动作 ,所以这个函数也可以简化成  。
。
为了保证上式能收敛,我们还需要一些其他条件。

条件一
上式表示对于任何初始值  ,它都满足
,它都满足  。这个条件要求保证timestep足够大,以最终克服任何初始条件或随机波动
。这个条件要求保证timestep足够大,以最终克服任何初始条件或随机波动
条件二
这个式子表示这些timestep将“足够小以确保能收敛到一个小值”。简而言之,第二个条件保证最终timestep会变小,以保证收敛。
既然如此,我们之前为什么要设 ![α_n(a)=α∈(0,1]](https://365bet-china.org/wp-content/uploads/2023/07/FbE1i.jpg%3D%CE%B1%E2%88%88%280%2C1%5D) 呢?它不是一个常数吗?这样的阈值会不会影响收敛?
呢?它不是一个常数吗?这样的阈值会不会影响收敛?
这些猜想都是正确的,但 ![(0,1]](https://365bet-china.org/wp-content/uploads/2023/07/5326315m.jpg) 这个阈值也有它存在的价值。我们在之前的
这个阈值也有它存在的价值。我们在之前的  上继续计算,最后可以获得一项
上继续计算,最后可以获得一项  ,因为
,因为  小于1,所以给予
小于1,所以给予  的权重随着介入奖励次数的增加而减少。
的权重随着介入奖励次数的增加而减少。
最佳动作值时非平稳的,我们不想收敛到一个特定的价值。
到目前为止,我们必须随机设定  的初始值,它本质上是一组用于初始化的超参数。这里有个小诀窍,我们可以设初始值
的初始值,它本质上是一组用于初始化的超参数。这里有个小诀窍,我们可以设初始值  ,其中
,其中  。
。
这样之后,因为  偏高,这时智能体会积极探索其他动作,当它越来越接近 时,智能体就开始贪婪了。换句话说,假设我们设当前拉杆的乐观回报是3,但它实际上最高能获得的回报只有2.5,智能体尝试一次后,发现回报只有1,低于乐观值,于是它会把其他拉杆全部尝试一遍。虽然前期效率很低,但到后期,智能体已经掌握哪些拉杆会产生高值,效果就接近“贪婪”了。
偏高,这时智能体会积极探索其他动作,当它越来越接近 时,智能体就开始贪婪了。换句话说,假设我们设当前拉杆的乐观回报是3,但它实际上最高能获得的回报只有2.5,智能体尝试一次后,发现回报只有1,低于乐观值,于是它会把其他拉杆全部尝试一遍。虽然前期效率很低,但到后期,智能体已经掌握哪些拉杆会产生高值,效果就接近“贪婪”了。
这种方法是可行的,在某种程度上,如果时间充裕,这个过程也可以被看作是模拟退火。但从整体来看,乐观初始值前期的大量“exploration”是不必要的,它对于非平稳问题来说不是最好的答案。
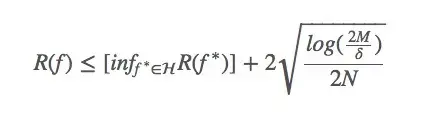
在机器学习系统中,Bias与Variance往往不可兼得:如果要降低模型的Bias,就一定程度上会提高模型的Variance;如果要降低Variance,Bias就会不可避免地提高。针对两者间的trade-off,下面的式子是一个很好的总结:
其中,
- 是假设 的(理论上)的风险;
- 是在假设集 中,假设 的最小风险;
- 是假设集 的大小;
- 是其中的样本数;
- 是一个常数(如果非要知道这个常数是什么,只能说它是我们选择一个差的假设的概率)。
 是假设
是假设  的(理论上)的风险;
的(理论上)的风险; 是在假设集
是在假设集  中,假设
中,假设  的大小;
的大小; 是其中的样本数;
是其中的样本数; 是一个常数(如果非要知道这个常数是什么,只能说它是我们选择一个差的假设的概率)。
是一个常数(如果非要知道这个常数是什么,只能说它是我们选择一个差的假设的概率)。这里有两个重点:
- 样本数量非常少,我们的边界非常松散。我们不知道目前的假设是否是最好的假设。
- 我们的假设越大,PAC(近似正确)学习的约束就越松散。
置信上限(UCB)是一个非常强大的算法,它可以用类似Bias-Variance权衡的方法来解决不同的问题。在老虎机问题中,我们可以把timestep 当成假设集大小  ,因为随着t逐渐增加,
,因为随着t逐渐增加,  也会逐渐增加,相应的 就很难选择。
也会逐渐增加,相应的 就很难选择。
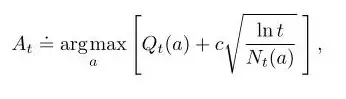
每选一次 ,不确定项就会减少,分母  增加;另一方面,每一次选择了 以外的动作, 会增加但 不会改变,不确定评估值会增加。
增加;另一方面,每一次选择了 以外的动作, 会增加但 不会改变,不确定评估值会增加。
截至目前,我们一直在努力估计 ,但如果说这个问题还有除了行动值以外的解决方法呢?比如我们该如何学习一个动作的偏好?
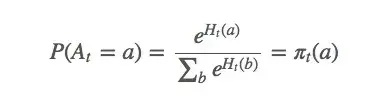
设动作偏好为  ,它和回报无关,只是一个动作相对于另一个动作的重要性。那么 应该符合gibbs分布(也就是机器学习的softmax分布):
,它和回报无关,只是一个动作相对于另一个动作的重要性。那么 应该符合gibbs分布(也就是机器学习的softmax分布):
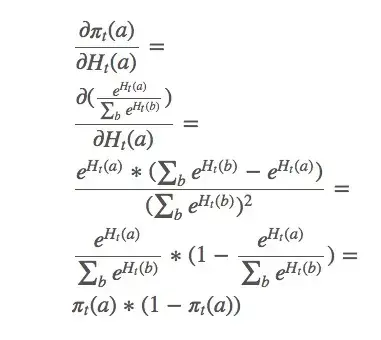
对于这个式子,我们该怎么基于梯度计算最大似然估计?首先,我们对 做梯度上升,因为它是我们的变量。我们想最大化  :
:
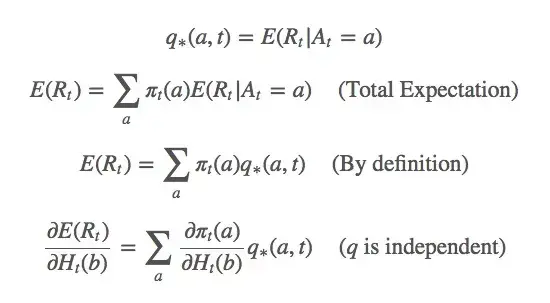
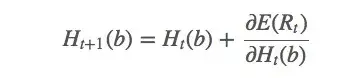
的更新规则如下所示:
gibbs分布分解:
这只是整个梯度的一个偏导数。那么  的动作呢?下面是省略计算过程的结果:
的动作呢?下面是省略计算过程的结果:
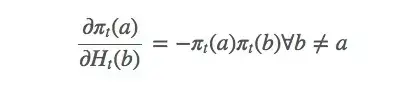
由此可得:
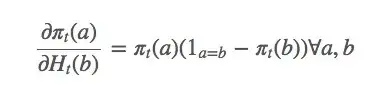
因为:

相应的,这个等式也是成立的:

由上述等式可得:
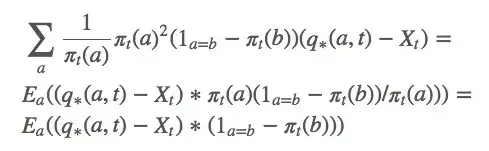
因为 被包含在动作a的预期值内,它也可以被写成 。现在就只剩一个问题了:等式里的  是什么?坦率地说,你想它是什么它就是什么,严谨起见,我们可以把 当成 的平均值。
是什么?坦率地说,你想它是什么它就是什么,严谨起见,我们可以把 当成 的平均值。
计算梯度后获得新的更新规则:

其中 是 时采取的动作。由于找到 的期望值  很困难,我们可以用随机值来更新:
很困难,我们可以用随机值来更新:

选择动作的简单方法是计算  ,问题就解决了。
,问题就解决了。
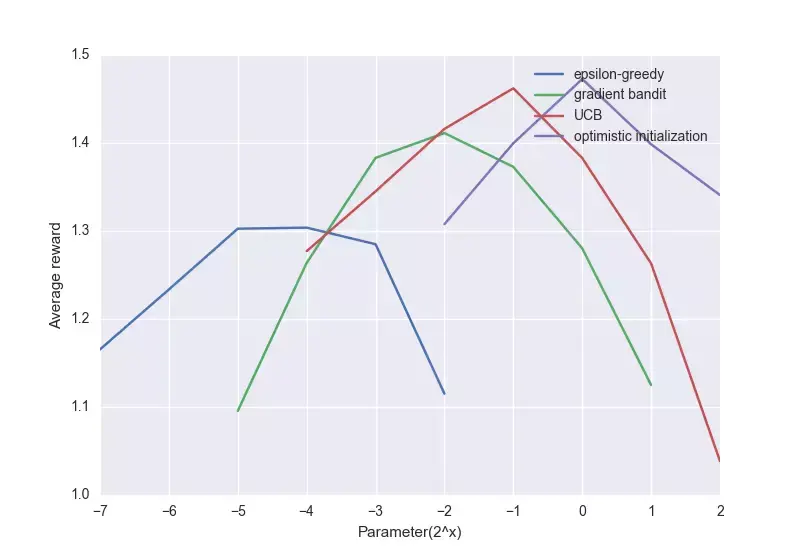
下面是上述算法的一个比较图:
 88老虎机
88老虎机88老虎机
尽管简单的方法表现不太好,但对很多强化学习问题来说,它们也称得上是最先进的算法了。


